前言:
我们使用小黄人的形象仅为技术分享与演示,无任何商业目的。
本篇为小黄人可动眼球装置制作全过程。
本项目附上代码、接线图、程序,有兴趣的伙伴自取。
这个小黄人可动眼球装置支持眼球转动及语音控制。整体实现难度较低,可以作为入门级练手项目。
在结构设计上,对原有小黄人 3D 模型进行了修改,内部空间相对充裕,为后续硬件扩展和功能升级提供了条件。
具体实现效果可参考我们的视频:
3D图纸/模型下载
以下两个打印文件都要下载
点击下载:小黄人外壳打印件
点击下载:眼球结构打印件
此次打印我们使用的一体的多色打印,我们用的3D打印机最多支持3色打印,为了减少打印时间,手部我们打印的黄色,之后在进行喷漆上色。

材料清单
硬件材料
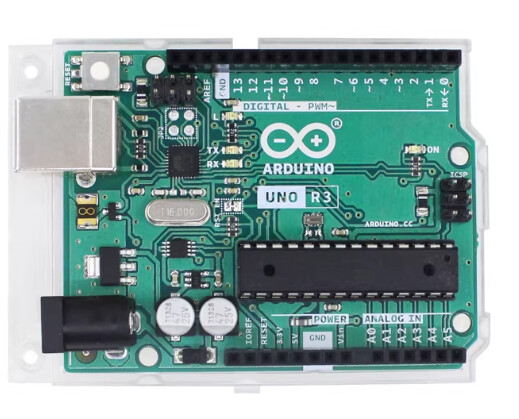
- Arduino 控制板*1,型号R3

- 舵机*4,型号:180度金属齿轮MG90S


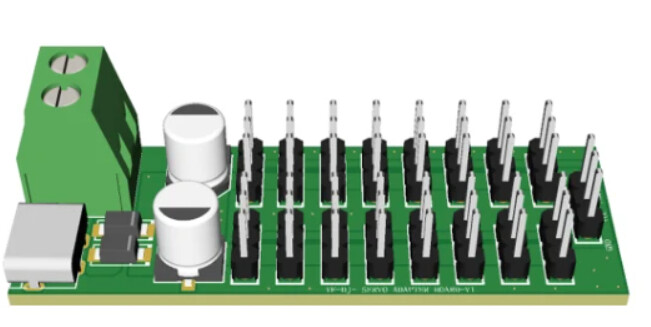
- 舵机插线板(拓展板)*1

- 降压模块*2,型号:5V/3A

- ASRPRO语音模块套装*1,包括语音模块、喇叭、麦克风 和烧录板。


- 一块3S电池
眼球结构固定
螺丝螺母建议多准备几个备用
- m3x12螺丝两个(固定眼皮)
- m2x5螺丝两个(眼球支撑固定)
眼球本身制作材料
浇注环氧树脂脱模过程会有些麻烦,如果对细节要求不是很高,可以只做玻璃贴片贴贴纸,不用灌模具,或者是在网上找一些仿真眼球贴片规格,选择直径为40mm的一般就可以。
眼球镜片*1,规格:40mm,扁正圆(建议可以多备两个)

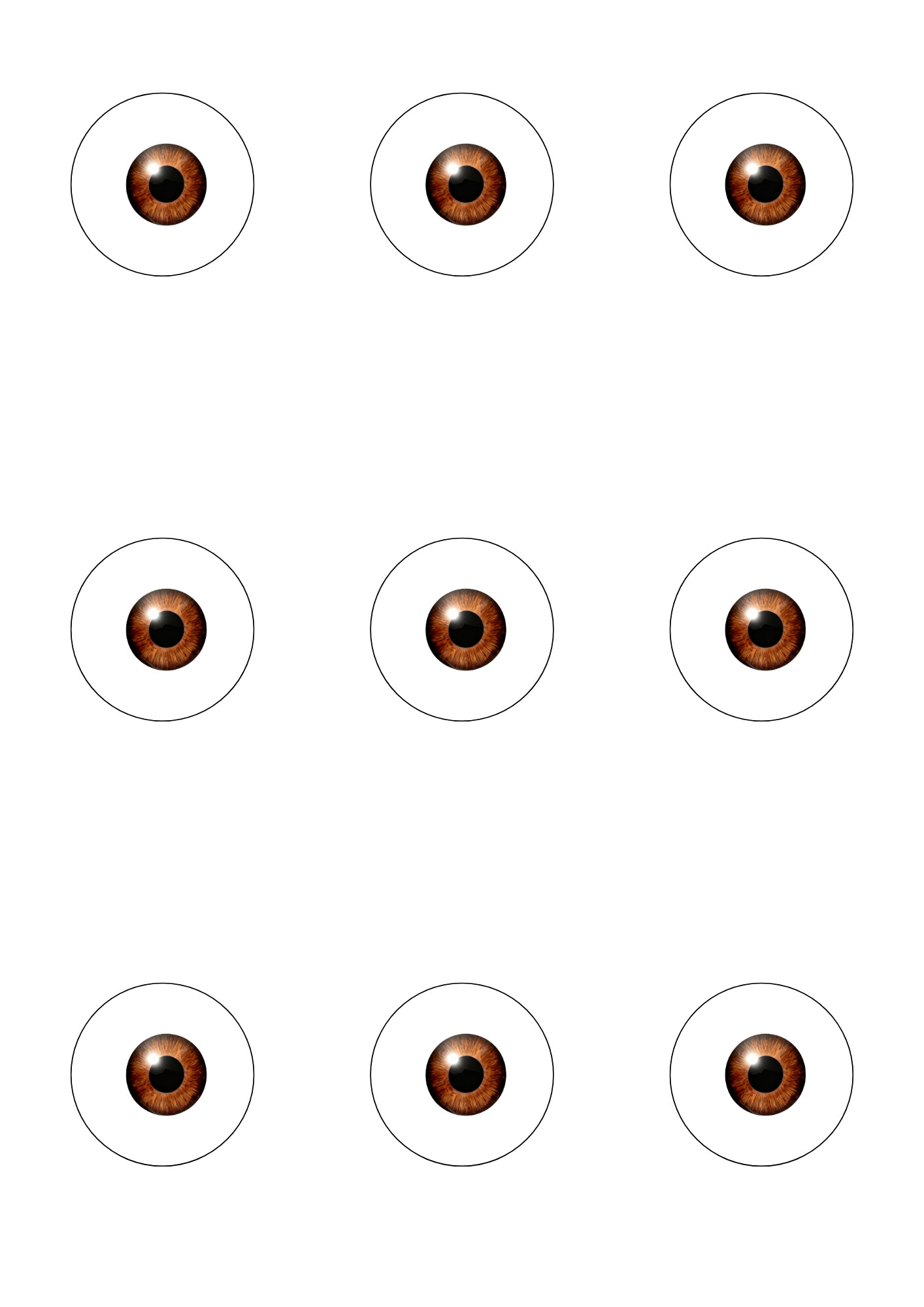
瞳孔贴纸*1,下载这张瞳孔样式并彩色打印出来。
以下不想浇注环氧树脂脱模可以不购买,但需要购买胶水用来粘玻璃球和眼球(502胶水或者透明胶水)
(做出来的玻璃眼球可能会有比较明显的分割线,或者一点气泡;但不影响整体效果)
环氧树脂*1套(两瓶)

固定模具

砂纸若干(按需购买)
黑色胶布
小黄人打印耗材
选用的是拓竹PLA3D打印材料,都用1卷就够了,以下是我们选择的颜色:



补色颜料
郡士模型油性漆,上色油性漆C-33【消光】消光黑*1
(用于小黄人手部喷漆上色,也可以选择其他方法)
眼球结构制作
制作眼球结构前,需要先把眼球结构先打印出来,眼球部分要用白色打印
以下制作眼球有两种方法,一种是不浇注环氧树脂的,时间最快最方便,做出来的玻璃眼球和半圆结构缝隙会比较明显;另外一种是浇注环氧树脂的,玻璃眼球和半圆结构缝隙会减少很多,但制作时间比较长,也比较考验手工。
1.眼球不浇注环氧树脂
把打印好后的眼球瞳孔图案剪下来,用胶水贴在眼球这个半圆结构上,再在上面覆盖并粘贴40mm的透明片。
胶水用502或者尽量透明无杂质的胶水。
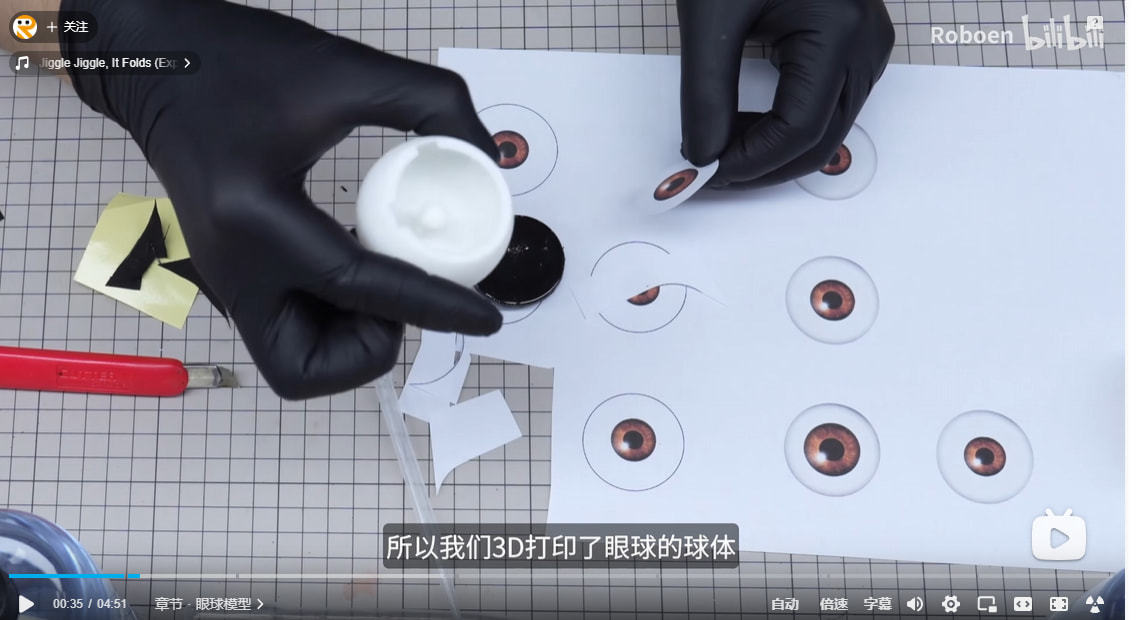


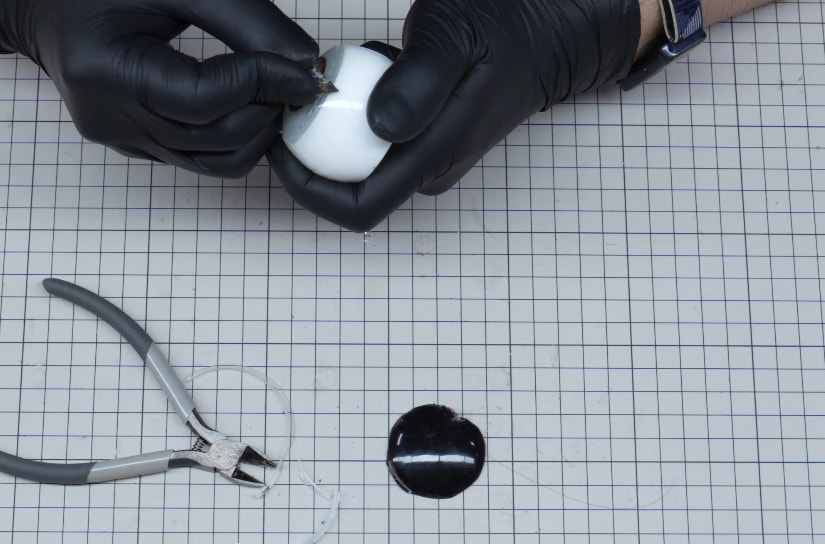
2.浇注环氧树脂
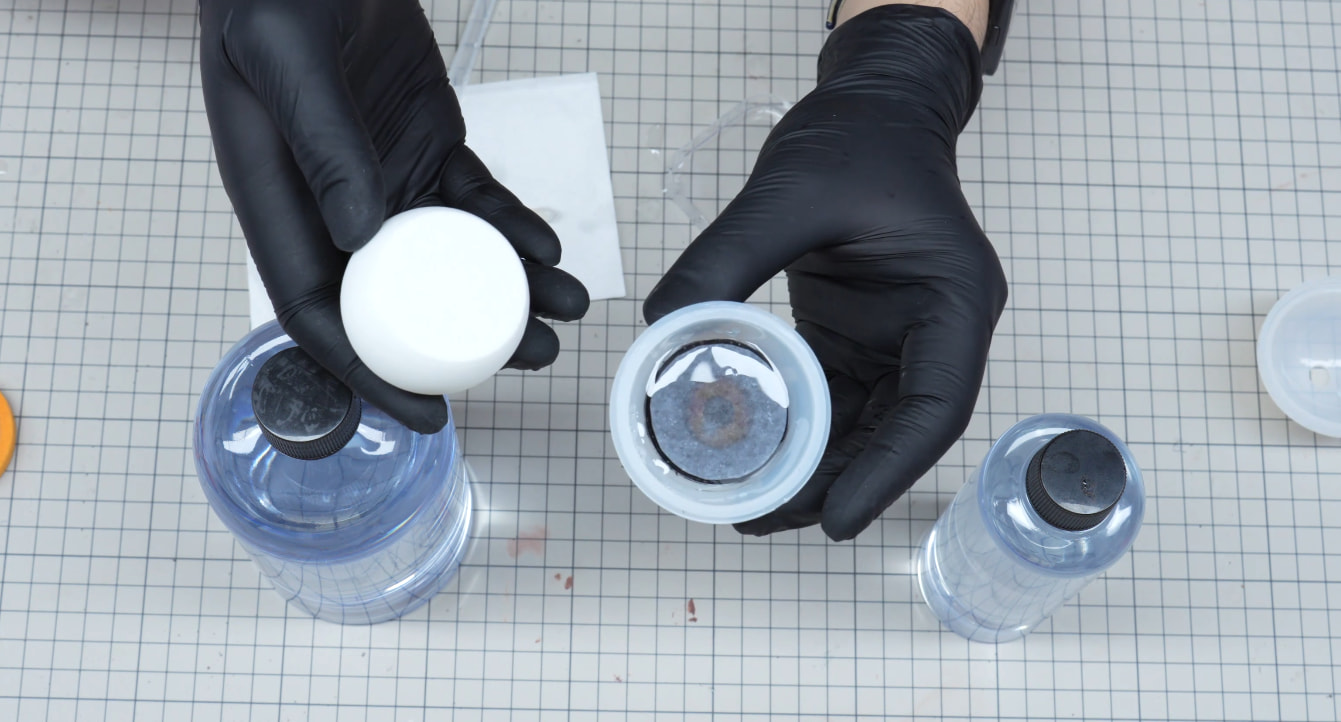
先把玻璃片表面贴上黑色胶布防护处理,
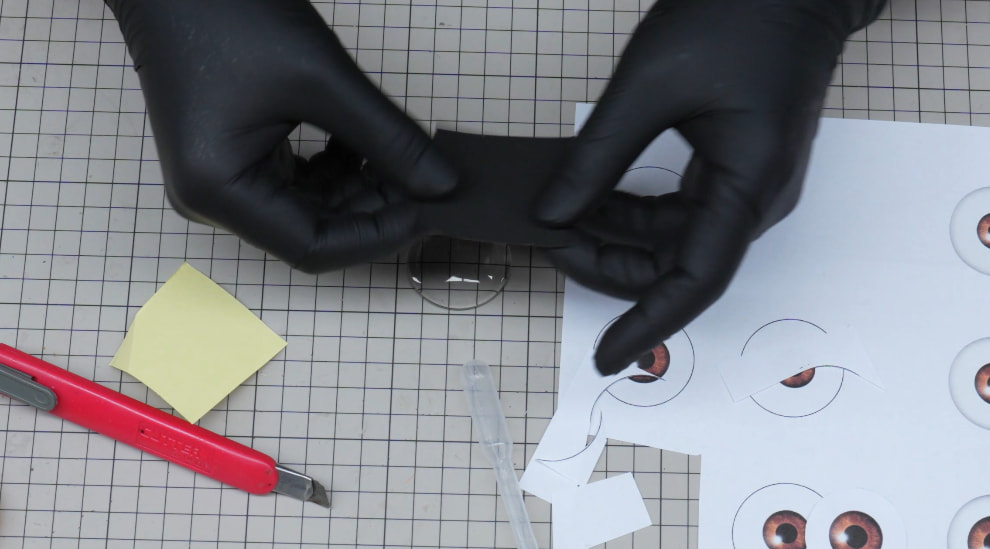

贴好后,放进模具里

把眼球瞳孔图案打印下来剪好后,图案朝下放进模具(居中)
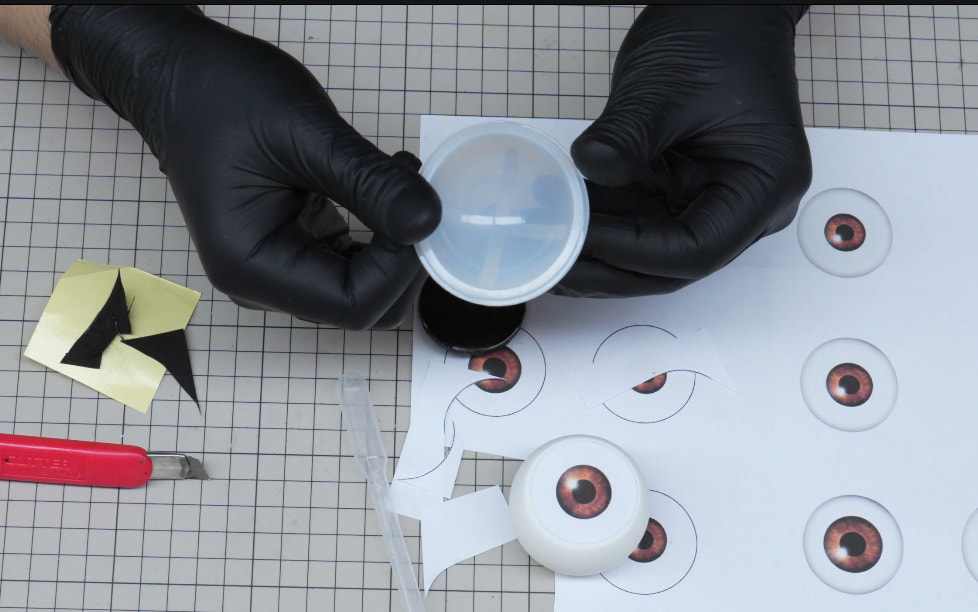
按照3:1的滴剂调配把环氧树脂混合搅拌均匀


把混合好的环氧树脂导入刚刚放好的模具中,表面涂抹均匀(保持瞳孔图案居中)

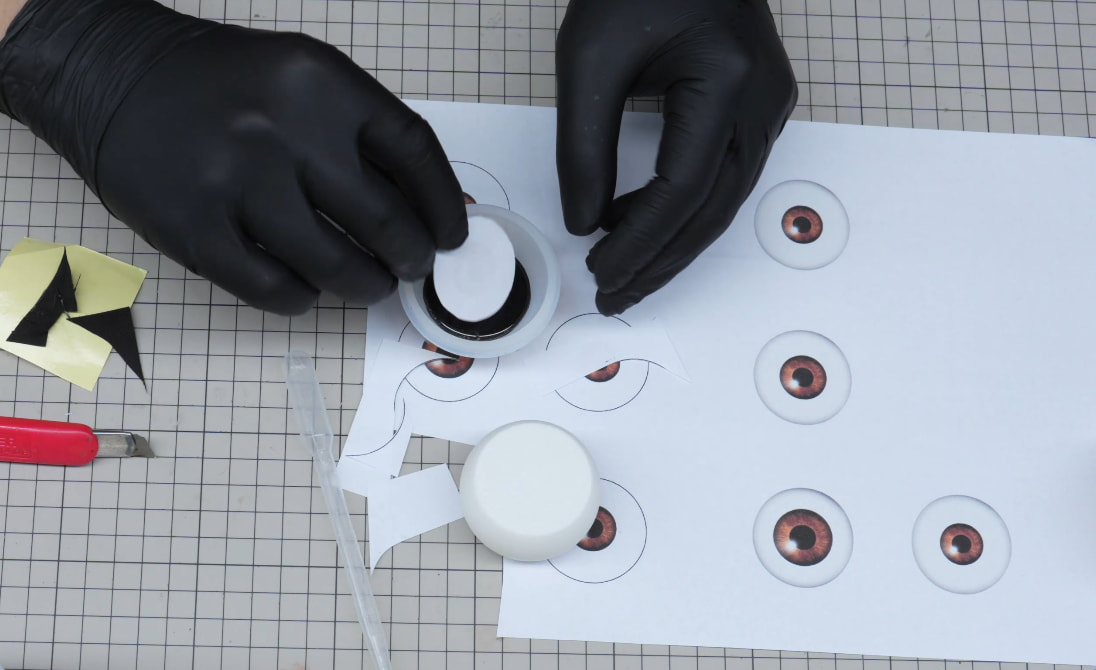
再倒入一些调配好的环氧树脂(要让环氧树脂填满缝隙),把眼球这个半圆结构装进去
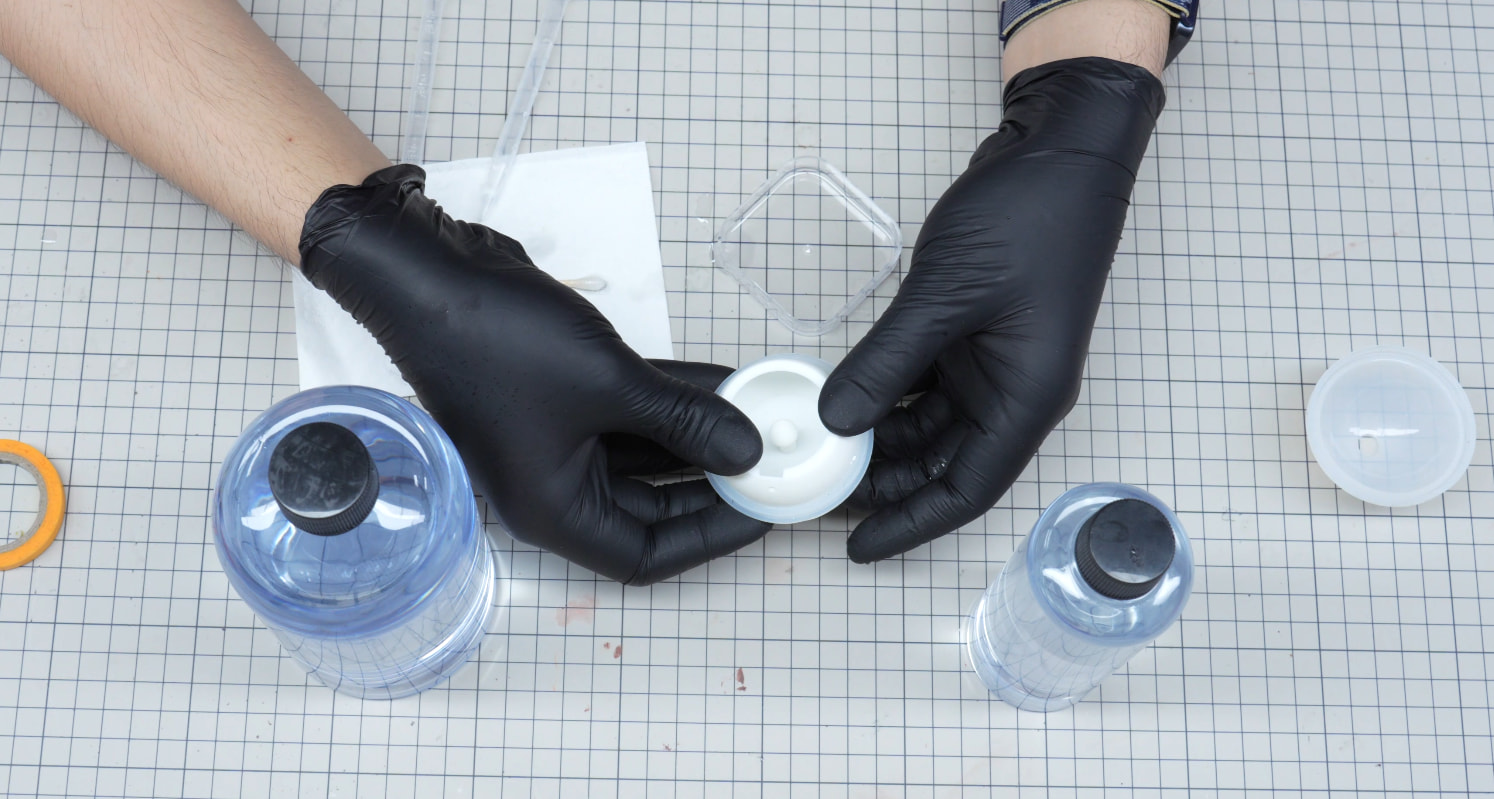
之后等待晾干一晚上后,就可以脱模了
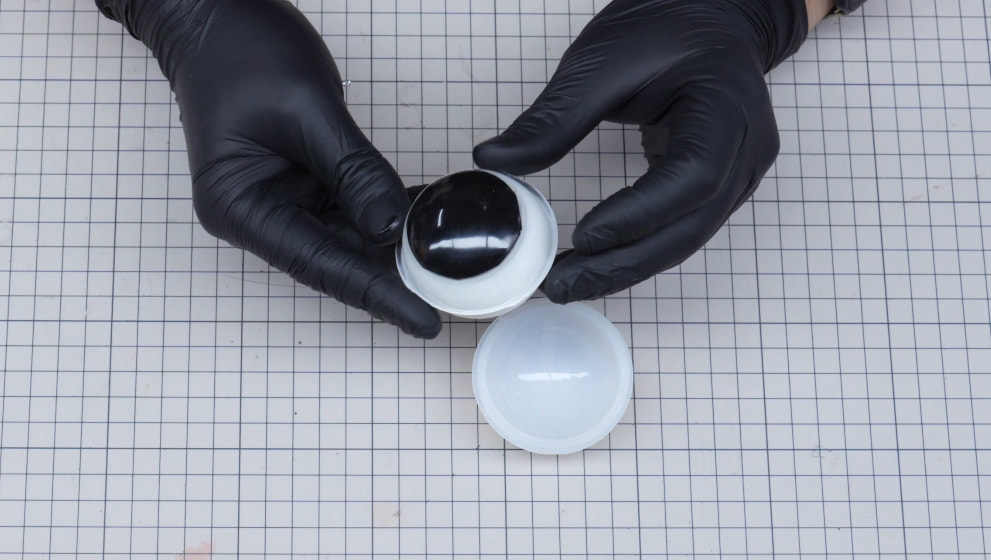
把表面这层黑色胶布轻轻撬开,并整理好边缘

此时边缘缝隙有点气泡是正常的,需要再用砂纸或者打磨器打磨好气泡和连接处的缝隙,(打磨前需要把表面再用黑色胶布包一下)

打磨好后就得到了一个光滑的眼球
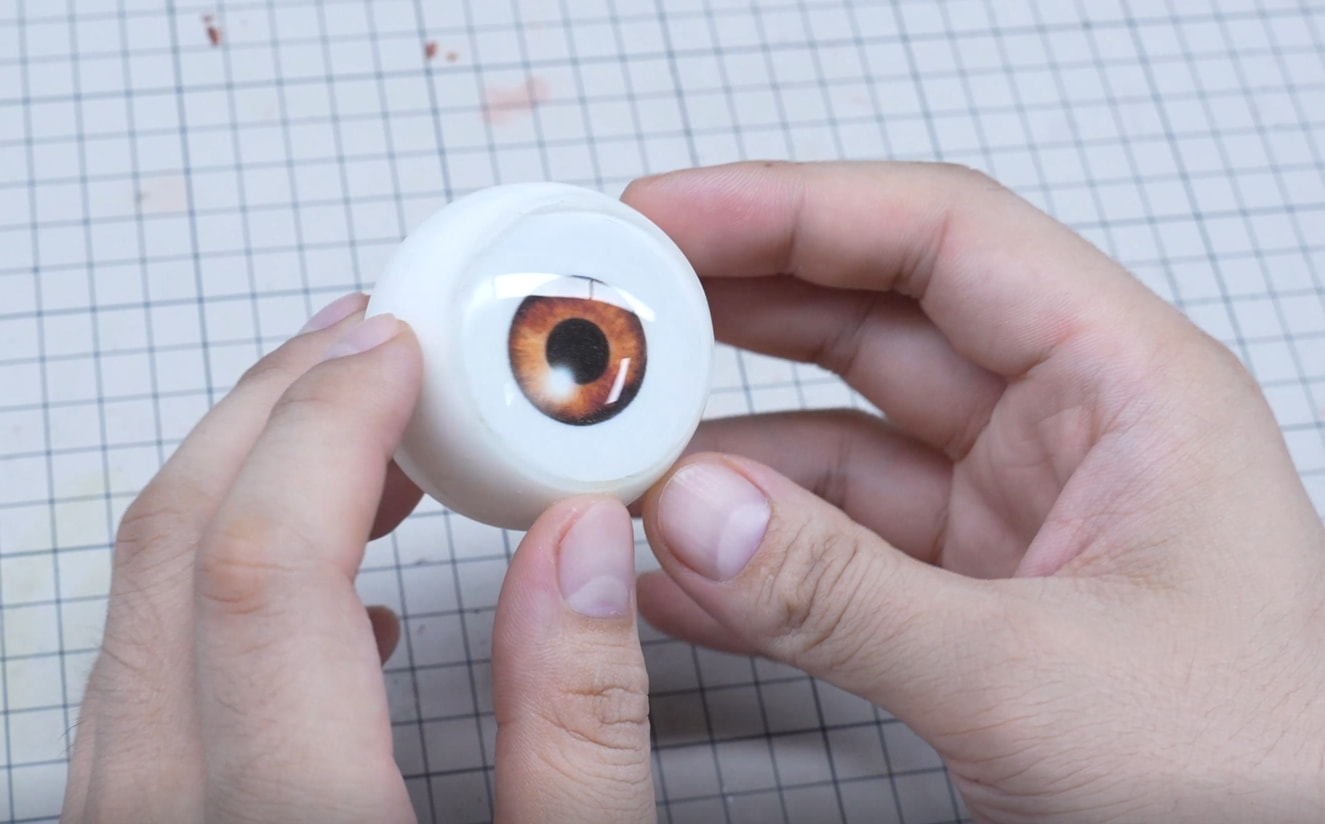
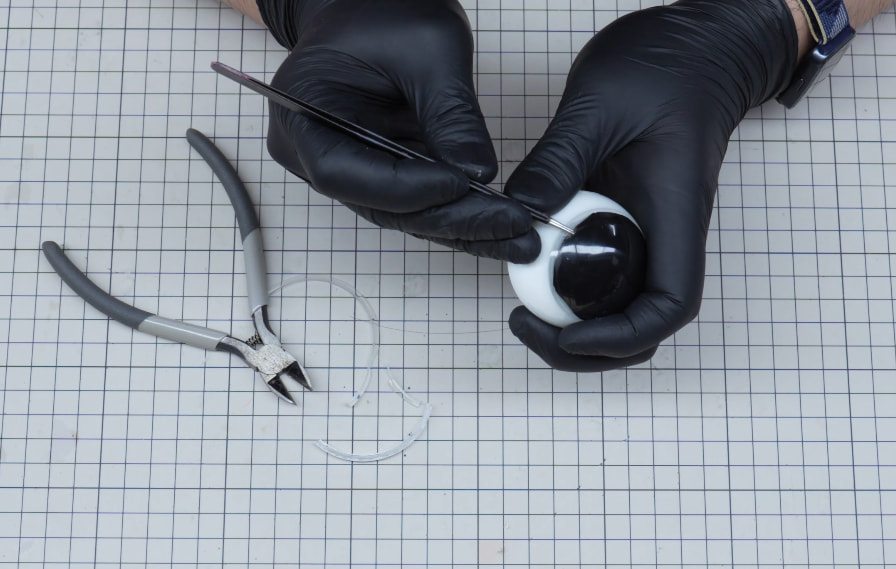
眼球装置的组装
接着把舵机和眼球装置的其他部分装好,这部分在视频里有介绍,可以参考视频01分01秒处。
视频参考:
需要注意的是装舵机拉杆的时候要根据眼球孔位和舵机臂的位置,合理弯折拉杆。这一步需要反复测试距离,也可以直接参考我们弯折方向。
和眼皮孔位通一侧的两个舵机连接眼皮,另外两个舵机控制眼球
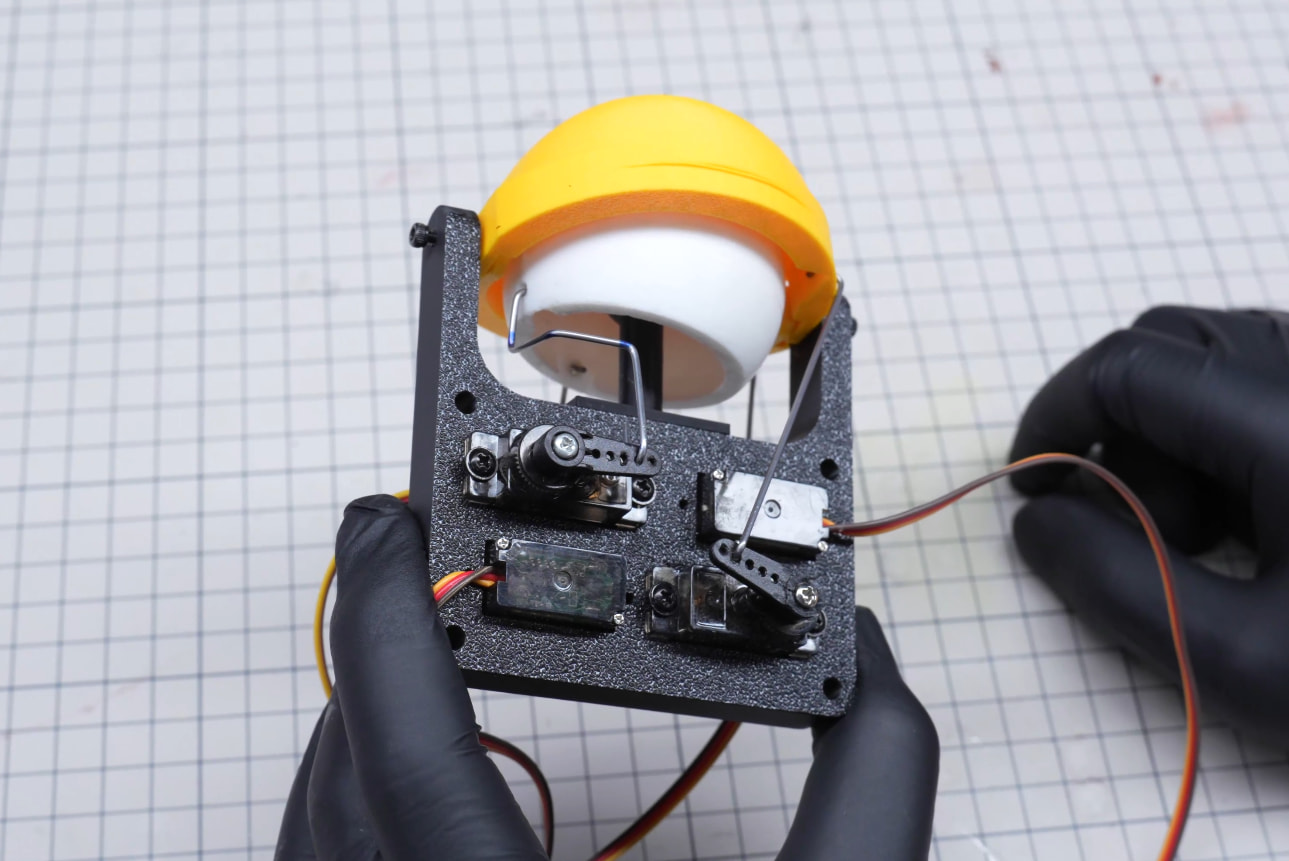
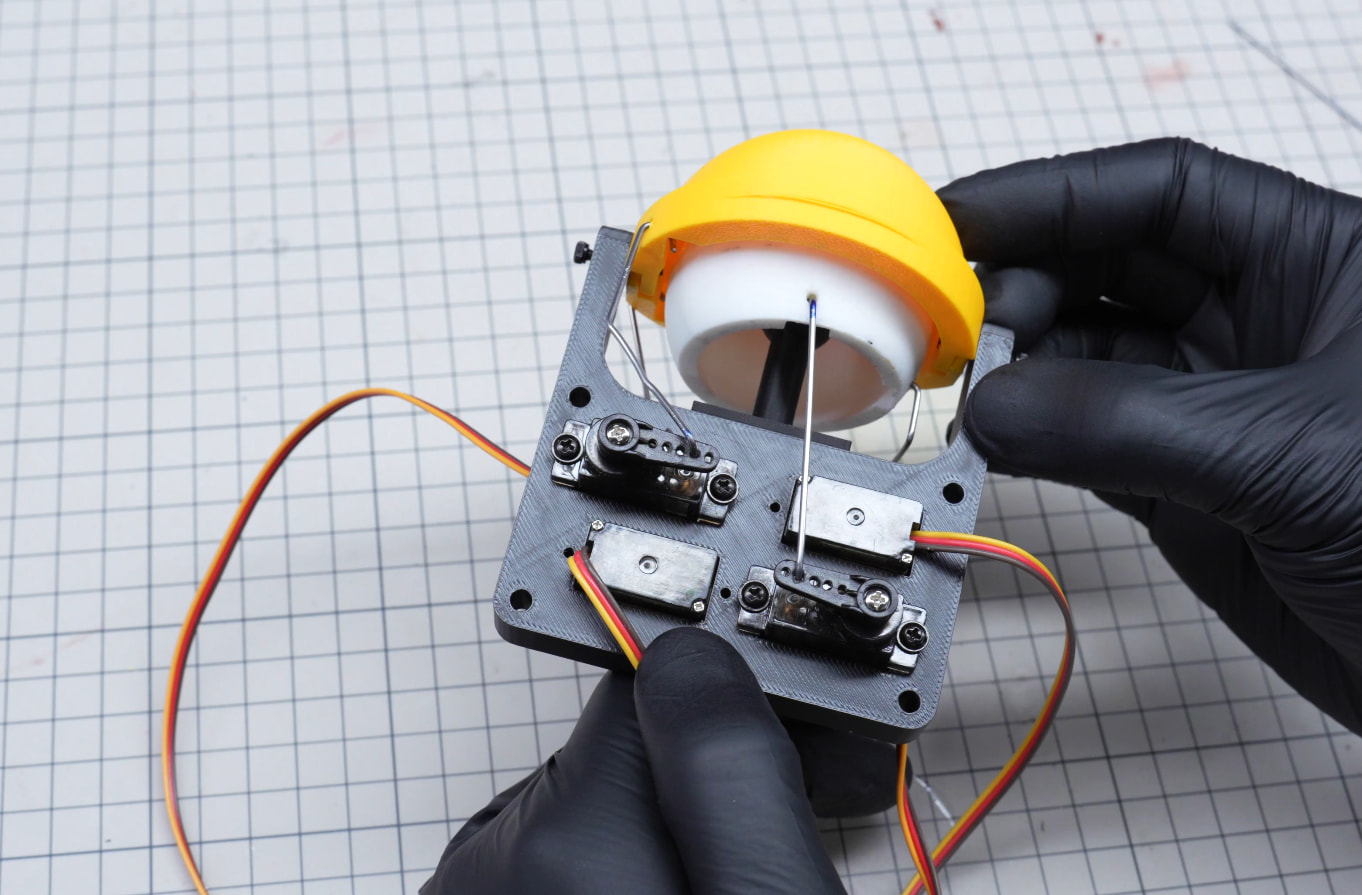
装好后可以先测试一下舵机
硬件组装(接线图)
接下去就是硬件组装,请按照以下接线方式接线。
如需高清PDF版接线图请留言。
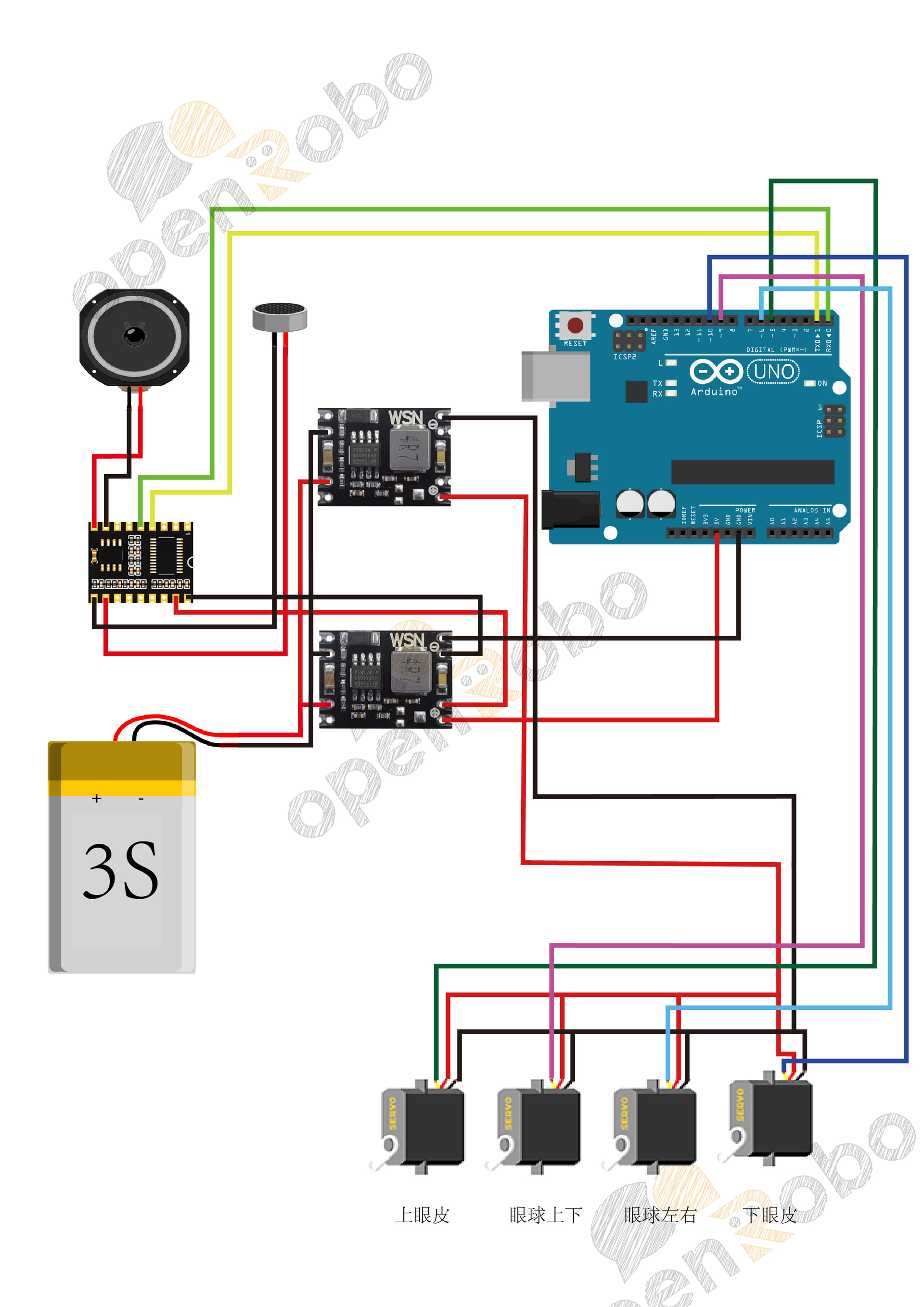
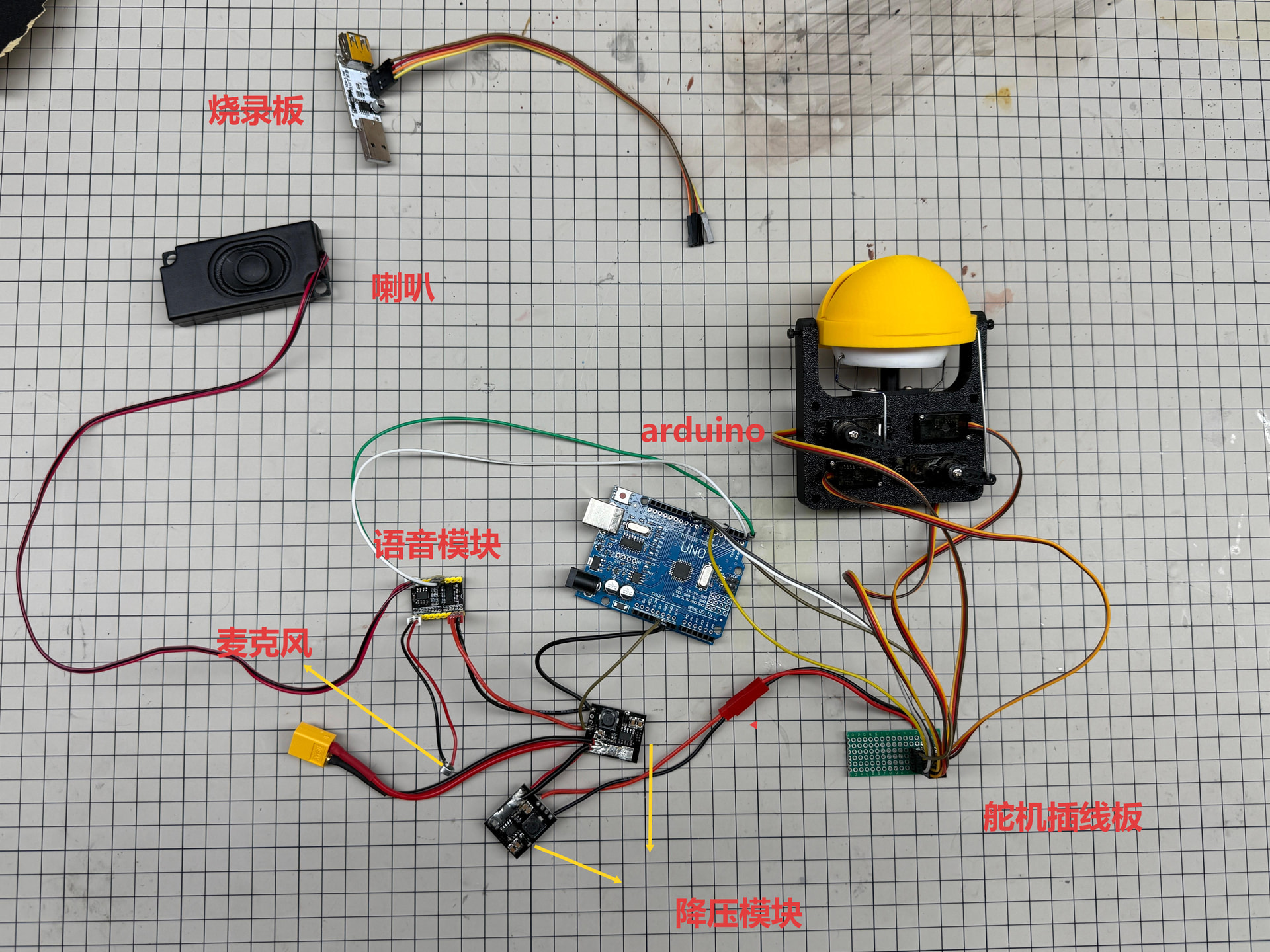
舵机和Arduino之间用了一块舵机插线板,接线图里没体现可以参考以下实物图。
以下是接线引脚号:
舵机控制:
上眼皮 – 插线板–Arduino PIN10;
下眼皮 --插线板—Arduino PIN5;
眼球水平 —插线板 --Arduino PIN 6;
眼球垂直 – 插线板-- Arduino PIN 9;烧录板连接语音模块
PB 5 – RX
PB 6 – TX
5V – VCC
GND – GND
(烧录板只在烧录的时候插上语音模块使用,烧录后可以拔出)
代码烧录
请先下载我们提供的代码程序。
点击下载:小黄人程序代码
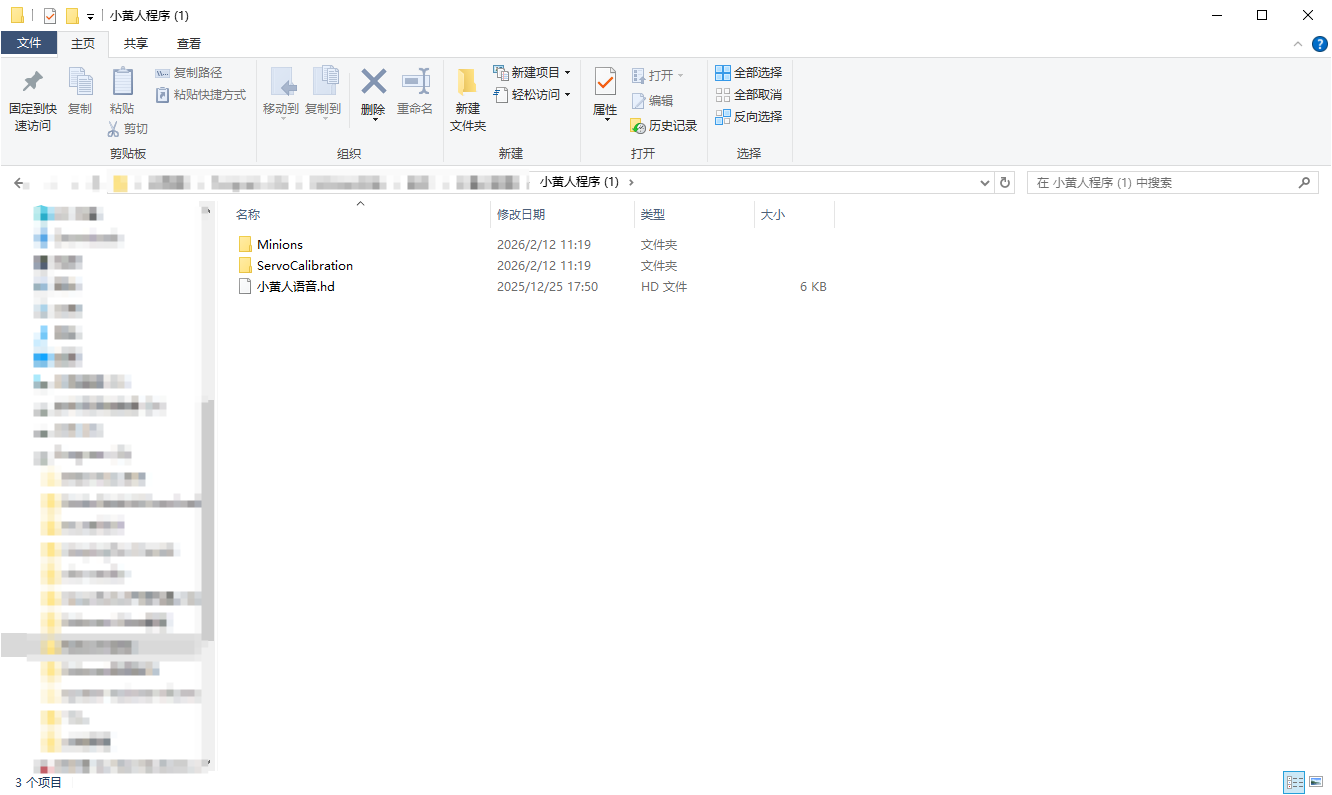
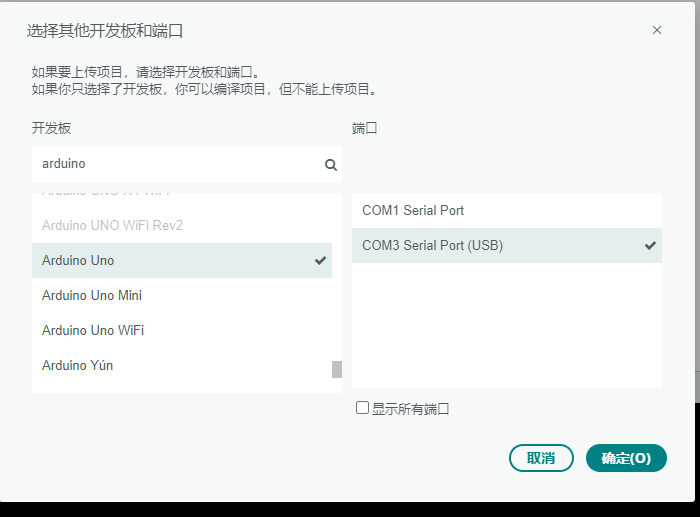
1.电脑安装Arduino IDE,并打开ServoCalibrasion.ino将arduino连接电脑,选择对应的开发板及端口并上传程序。
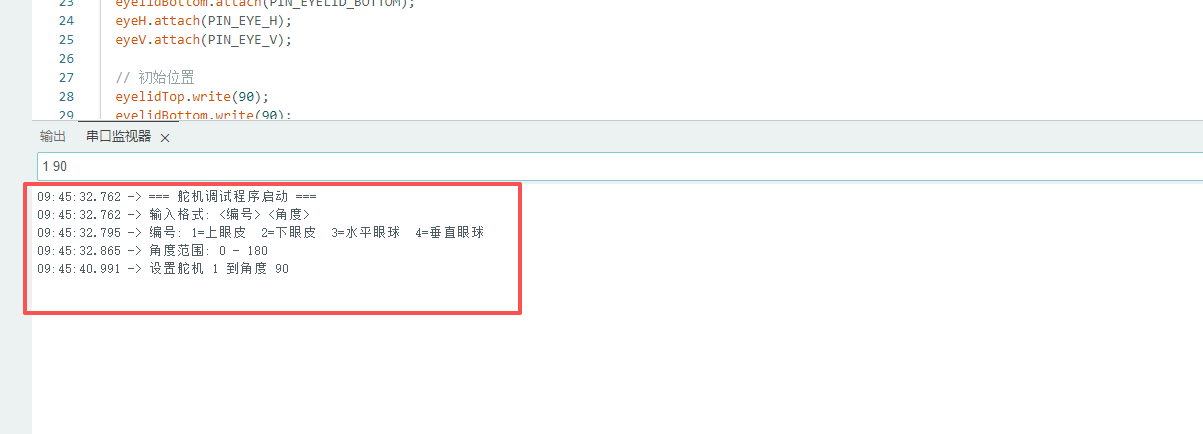
2.程序上传完成后,打开右上角的串口监视器,选择波特率9600在消息框输入校准指令。
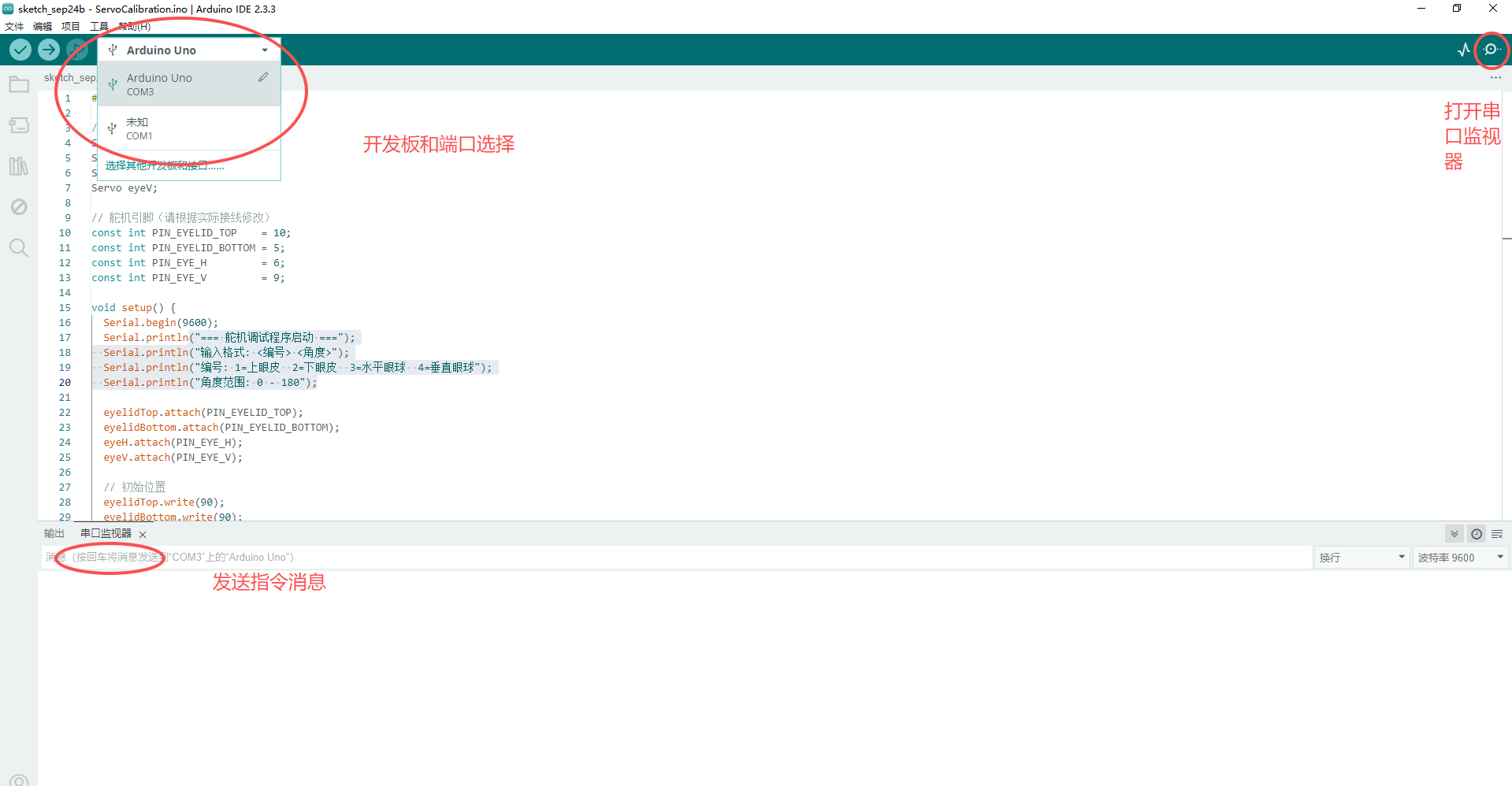
指令示例:1 90 上眼皮90度
(“输入格式: <编号> <角度>”);
(“编号: 1=上眼皮 2=下眼皮 3=水平眼球 4=垂直眼球”);
(“角度范围: 0 - 180”);
3.调整每个舵机实际可以执行的最大最小角度,并记录下来。然后打开Minions.ino主程序找到初始角度,改为刚才校准的值,眼球部分取中间值。
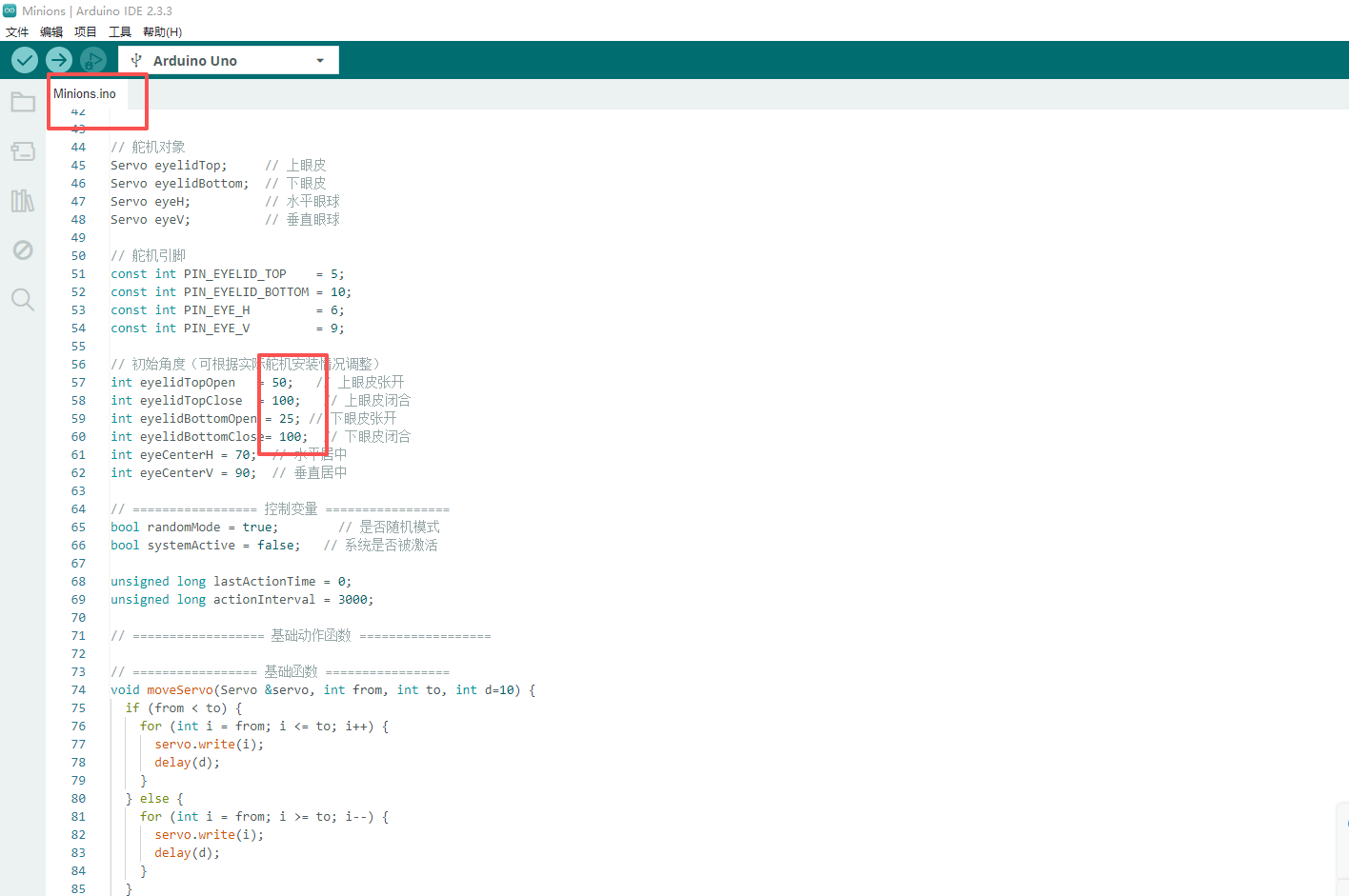
4.修改完数值之后就可以点击上传,等待上传完成arduino的程序就设置好了。
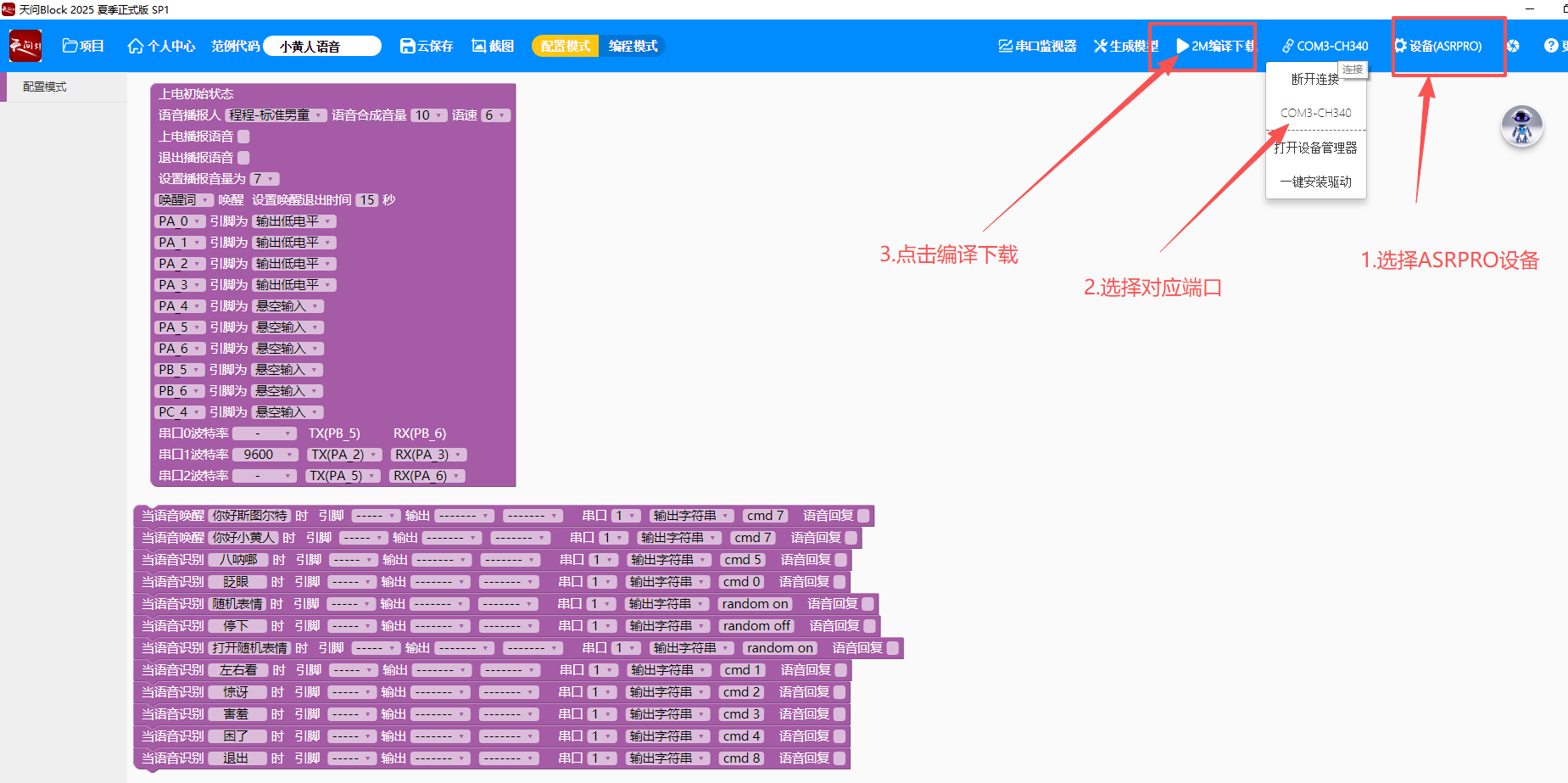
1.安装语音模块编辑软件。

2.打开小黄人语音.hd文件
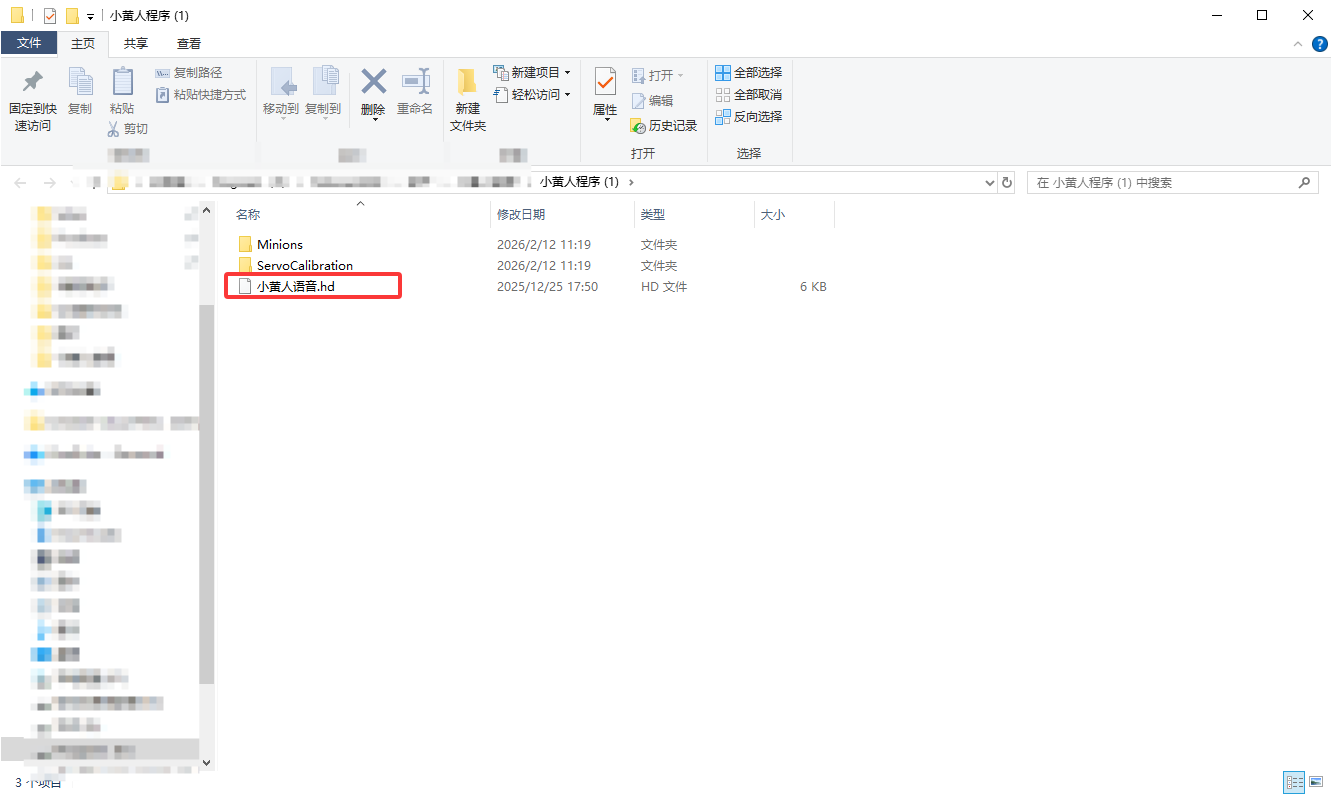
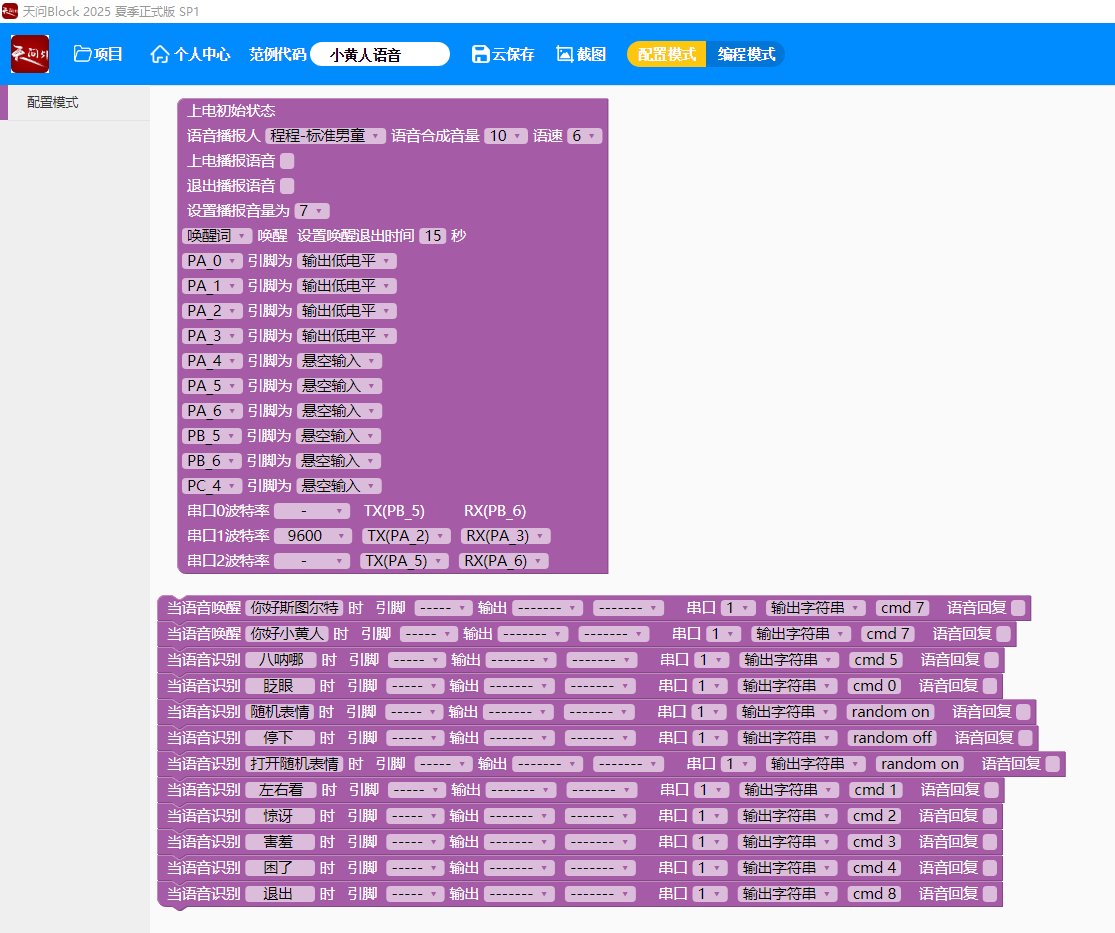
3.把烧录板连接到语音模块上,然后烧录板通过USB接口插到电脑上,连接电脑。
烧录板和语音模块的接线:
PB 5 – RX
PB 6 – TX
5V – VCC
GND – GND
4.连接完成后,在软件上选择对应设备和对应端口,编译下载完即可。